Online Learning是工业界比较常用的机器学习算法,在很多场景下都能有很好的效果。本文主要介绍Online Learning的基本原理和两种常用的Online Learning算法:FTRL(Follow The Regularized Leader)[1]和BPR(Bayesian Probit Regression)[2],以及Online Learning在美团移动端推荐重排序的应用。
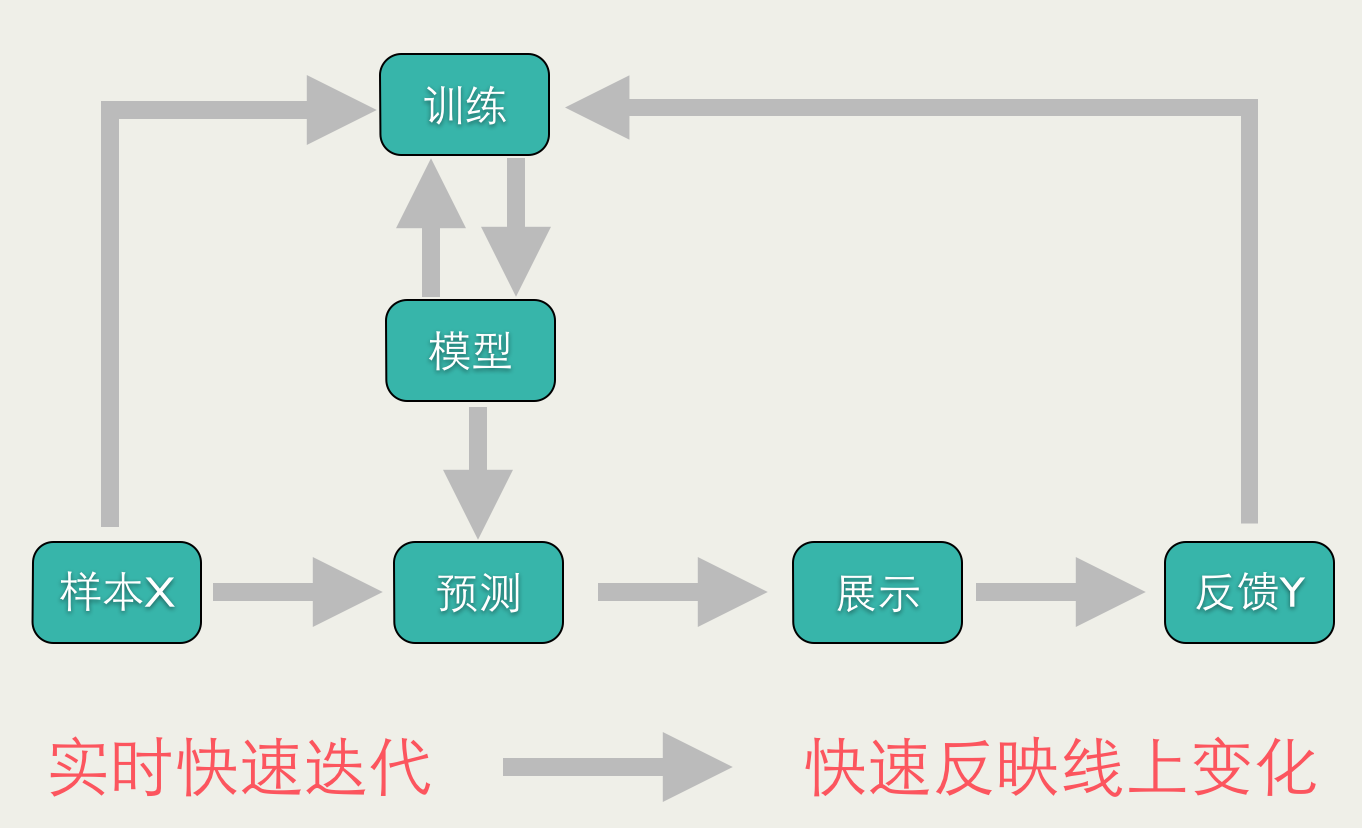
准确地说,Online Learning并不是一种模型,而是一种模型的训练方法,Online Learning能够根据线上反馈数据,实时快速地进行模型调整,使得模型及时反映线上的变化,提高线上预测的准确率。Online Learning的流程包括:将模型的预测结果展现给用户,然后收集用户的反馈数据,再用来训练模型,形成闭环的系统。如下图所示:
Online Learning有点像自动控制系统,但又不尽相同,二者的区别是:Online Learning的优化目标是整体的损失函数最小化,而自动控制系统要求最终结果与期望值的偏差最小。
传统的训练方法,模型上线后,更新的周期会比较长(一般是一天,效率高的时候为一小时),这种模型上线后,一般是静态的(一段时间内不会改变),不会与线上的状况有任何互动,假设预测错了,只能在下一次更新的时候完成更正。Online Learning训练方法不同,会根据线上预测的结果动态调整模型。如果模型预测错误,会及时做出修正。因此,Online Learning能够更加及时地反映线上变化。
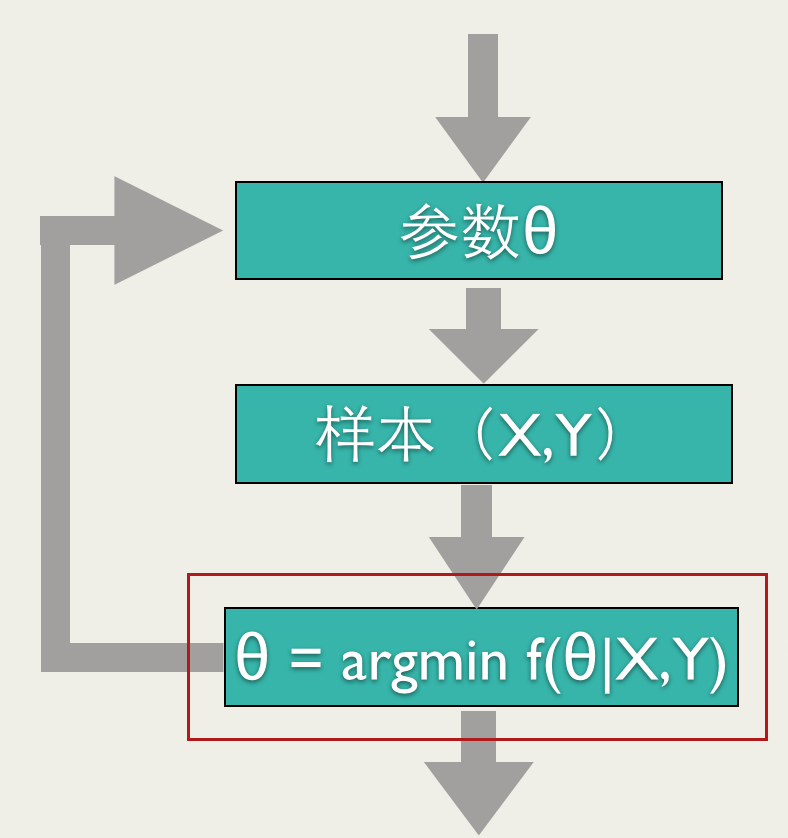
如上图所示,Online Learning训练过程也需要优化一个目标函数(红框标注的),但是和其他的训练方法不同,Online Learning要求快速求出目标函数的最优解,最好是能有解析解。
前面说到Online Learning要求快速求出目标函数的最优解。要满足这个要求,一般的做法有两种:Bayesian Online Learning和Follow The Regularized Leader。下面就详细介绍这两种做法的思路。
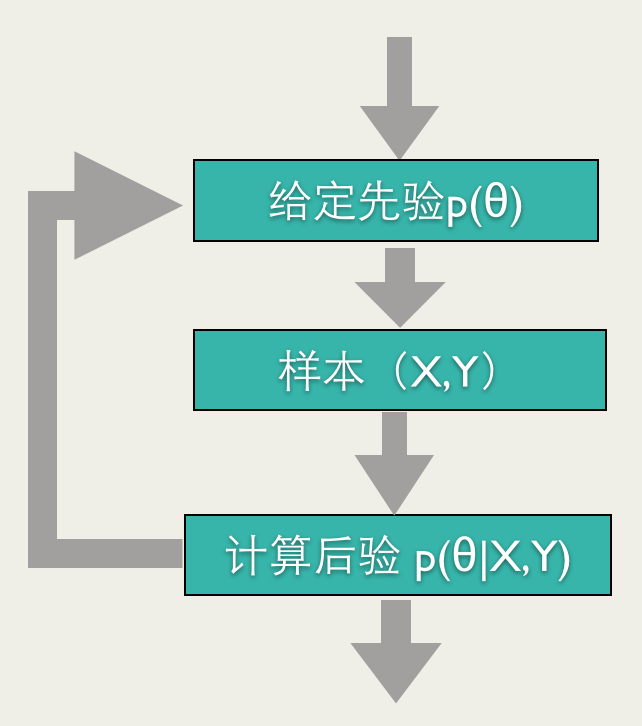
贝叶斯方法能够比较自然地导出Online Learning的训练方法:给定参数先验,根据反馈计算后验,将其作为下一次预测的先验,然后再根据反馈计算后验,如此进行下去,就是一个Online Learning的过程,如下图所示。
举个例子, 我们做一个抛硬币实验,估算硬币正面的概率\( \mu \)。我们假设\( \mu \)的先验满足
p ( μ ) = Beta ( α , β ) p\left(\mu \right) = \operatorname{Beta}(\alpha, \beta) p ( μ ) = Beta ( α , β )
对于观测值\( Y=1 \),代表是正面,我们可以算的后验:
p ( μ ∣ Y = 1 ) = Beta ( α + 1 , β ) p\left( \mu | Y=1 \right) = \operatorname{Beta}(\alpha+1, \beta) p ( μ ∣ Y = 1 ) = Beta ( α + 1 , β )
对于观测值\( Y=0 \),代表是反面,我们可以算的后验:
p ( μ ∣ Y = 0 ) = Beta ( α , β + 1 ) p\left(\mu \mid Y=0\right) = \operatorname{Beta}(\alpha, \beta+1) p ( μ ∣ Y = 0 ) = Beta ( α , β + 1 )
按照上面的Bayesian Online Learning流程,我们可以得到估算\( \mu \)的Online Learning算法:
初始化 \( \alpha \),\( \beta \) for i = 0 ... n
如果 \( Y_i \)是正面 \( \alpha = \alpha + 1 \) 如果 \(Y_i\)是反面 \( \beta = \beta + 1 \) 最终: \( \mu \sim \operatorname{Beta}(\alpha, \beta) \),可以取\( \mu \)的期望,\( \mu = \frac{\alpha}{\alpha+\beta}\) 假设抛了\(N\)次硬币,正面出现\(H\)次,反面出现\(T\)次,按照上面的算法,可以算得:
μ = α + H α + β + N \mu = \frac{ \alpha + H}{\alpha + \beta + N} μ = α + β + N α + H
和最大化似然函数:
l o g [ p ( μ ∣ α , β ) ⋅ p ( Y = 1 ∣ μ ) H ⋅ p ( Y = 0 ∣ μ ) T ] \mathrm{log}\left[ p\left(\mu \mid \alpha,\beta \right) \cdot p \left( Y = 1 \mid \mu \right)^{H} \cdot p \left( Y = 0 \mid \mu \right)^{T} \right] log [ p ( μ ∣ α , β ) ⋅ p ( Y = 1 ∣ μ ) H ⋅ p ( Y = 0 ∣ μ ) T ]
得到的解是一样的。
上面的例子是针对离散分布的,我们可以再看一个连续分布的例子。
有一种测量仪器,测量的方差\( \sigma^2\)是已知的, 测量结果为:\( Y_1 , Y_2 , Y_3 , ... , Y_n \), 求真实值\( \mu \)的分布。 仪器的方差是\( \sigma ^{2}\), 所以观测值Y满足高斯分布:
p ( Y ∣ μ ) = N ( Y ∣ μ , σ 2 ) p\left(Y \mid \mu\right) = N\left( Y \mid \mu,\sigma^2 \right) p ( Y ∣ μ ) = N ( Y ∣ μ , σ 2 )
观测到 \( Y_1 , Y_2 , Y_3 , ... , Y_n \), 估计参数 \( \mu \) 。 假设参数 \( \mu \) 满足高斯分布:
p ( μ ) = N ( μ ∣ m , v 2 ) p\left( \mu \right) = N\left( \mu \mid m ,v ^2 \right) p ( μ ) = N ( μ ∣ m , v 2 )
观测到\( Y_i \), 可以计算的后验:
p ( μ ∣ Y i ) = N ( μ ∣ Y i v 2 + m σ 2 σ 2 + v 2 , σ 2 v 2 σ 2 + v 2 ) p \left( \mu \mid Y_i \right) = N\left( \mu \mid \frac{Y_i v^{2}+m\sigma^{2}}{\sigma^{2}+v^{2}} , \frac{\sigma^{2}v^{2}}{\sigma^{2}+v^{2}} \right) p ( μ ∣ Y i ) = N ( μ ∣ σ 2 + v 2 Y i v 2 + m σ 2 , σ 2 + v 2 σ 2 v 2 )
可以得到以下的Online Learning算法:
初始化 \( m \),\( v ^{2} \) for i = 0 ... n
观测值为\( Y_{i} \) 更新
m = Y i v 2 + m σ 2 σ 2 + v 2 m = \frac{Y_i v^{2} + m \sigma^{2}}{\sigma^{2} + v^{2}} m = σ 2 + v 2 Y i v 2 + m σ 2
v 2 = σ 2 v 2 σ 2 + v 2 v^{2} = \frac{\sigma^{2} v^{2}}{\sigma^{2} + v^{2} } v 2 = σ 2 + v 2 σ 2 v 2
上面的两个结果都是后验跟先验是同一分布的(一般取共轭先验,就会有这样的效果),这个后验很自然的作为后面参数估计的先验。假设后验分布和先验不一样,我们该怎么办呢?
举个例子:假设上面的测量仪器只能观测到\( Y \),是大于0,还是小于0,即\(Y_{i} \in \{-1,1\} \),\( Y_{i} = -1\),代表观测值小于0,\( Y_{i} = 1\)代表观测值大于0。 此时,我们仍然可以计算后验分布:
p ( μ ∣ Y i = 1 ) = I ( μ > 0 ) p ( μ ) ∫ 0 + ∞ p ( μ ) d u p( \mu \mid Y_i =1) = \frac{ I(\mu > 0 )p(\mu)}{ \int_{0}^{+\infty} p(\mu)\mathrm{d}u} p ( μ ∣ Y i = 1 ) = ∫ 0 + ∞ p ( μ ) d u I ( μ > 0 ) p ( μ )
p ( μ ∣ Y i = − 1 ) = I ( μ < 0 ) p ( μ ) ∫ − ∞ 0 p ( μ ) d u p( \mu \mid Y_i =-1) = \frac{ I(\mu< 0) p(\mu)}{ \int_{-\infty}^{0} p(\mu)\mathrm{d}u} p ( μ ∣ Y i = − 1 ) = ∫ − ∞ 0 p ( μ ) d u I ( μ < 0 ) p ( μ )
但是后验分布显然不是高斯分布(是截断高斯分布),这种情况下,我们可以用和上面分布KL距离最近的高斯分布代替。 观测到\( Y_{i} = 1\)
K L ( p ( μ ∣ Y i = 1 ) ∣ ∣ N ( μ ∣ m ~ , v ~ 2 ) ) KL( p(\mu \mid Y_i =1) || N(\mu \mid \tilde m ,\tilde v^{2})) K L ( p ( μ ∣ Y i = 1 ) ∣∣ N ( μ ∣ m ~ , v ~ 2 ))
可以求得:
m ~ = m + v ⋅ υ ( m v ) \tilde m = m + v \cdot \upsilon\left(\frac{m}{v}\right) m ~ = m + v ⋅ υ ( v m )
v ~ 2 = v 2 ( 1 − ω ( m v ) ) \tilde v^{2} = v^2\left(1 - \omega\left(\frac{m}{v}\right)\right) v ~ 2 = v 2 ( 1 − ω ( v m ) )
观测到\( Y_{i} = -1\)
K L ( p ( μ ∣ Y i = − 1 ) ∣ ∣ N ( μ ∣ μ ~ , v ~ 2 ) ) KL( p(\mu \mid Y_i =-1) || N(\mu \mid \tilde \mu ,\tilde v^{2})) K L ( p ( μ ∣ Y i = − 1 ) ∣∣ N ( μ ∣ μ ~ , v ~ 2 ))
可以求得:
m ~ = m − v ⋅ υ ( − m v ) \tilde m = m - v \cdot \upsilon\left(-\frac{m}{v}\right) m ~ = m − v ⋅ υ ( − v m )
v ~ 2 = v 2 ( 1 − ω ( − m v ) ) \tilde v^{2} = v^2\left(1 - \omega\left(-\frac{m}{v}\right)\right) v ~ 2 = v 2 ( 1 − ω ( − v m ) )
两者综合起来,可以求得:
m ~ = m + Y i v ⋅ υ ( Y i m v ) \tilde m = m + Y_{i} v \cdot \upsilon\left(Y_{i}\frac{m}{v}\right) m ~ = m + Y i v ⋅ υ ( Y i v m )
v ~ 2 = v 2 ( 1 − ω ( Y i m v ) ) \tilde v^{2} = v^2\left(1 - \omega\left(Y_{i}\frac{m}{v}\right)\right) v ~ 2 = v 2 ( 1 − ω ( Y i v m ) )
其中:
υ ( t ) = ϕ ( t ) Φ ( t ) \upsilon(t) = \frac{\phi(t)}{\Phi(t)} υ ( t ) = Φ ( t ) ϕ ( t )
ϕ ( t ) = 1 2 π e x p ( − 1 2 t 2 ) \phi(t) = \frac{1}{2\pi} \mathrm{exp} \left(-\frac{1}{2} t^2\right) ϕ ( t ) = 2 π 1 exp ( − 2 1 t 2 )
Φ ( t ) = ∫ − ∞ t ϕ ( t ) d t \Phi(t)=\int_{-\infty}^{t} \phi(t)\mathrm{d}t Φ ( t ) = ∫ − ∞ t ϕ ( t ) d t
ω ( t ) = υ ( t ) ∗ ( t − υ ( t ) ) \omega(t) = \upsilon(t)*(t-\upsilon(t)) ω ( t ) = υ ( t ) ∗ ( t − υ ( t ))
有了后验我们可以得到Online Bayesian Learning流程:
初始化 \( m \),\( v ^{2} \) for i = 0 ... n
观测值为\( Y_{i} \) 更新
m = m + Y i ⋅ v ⋅ υ ( Y i ⋅ m v ) m = m + Y_{i} \cdot v \cdot \upsilon\left(Y_{i} \cdot \frac{m}{v}\right) m = m + Y i ⋅ v ⋅ υ ( Y i ⋅ v m )
v 2 = v 2 ( 1 − ω ( Y i ⋅ m v ) ) v^{2} = v^2\left(1 - \omega\left(Y_{i} \cdot \frac{m}{v}\right)\right) v 2 = v 2 ( 1 − ω ( Y i ⋅ v m ) )
Bayesian Online Learning最常见的应用就是BPR(Bayesian Probit Regression)。
在看Online BPR前,我们先了解以下Linear Gaussian System(具体可以参考[3]的4.4节)。 \(x\)是满足多维高斯分布:
p ( x ) = N ( x ∣ μ x , Σ x ) p \left( x \right) = N \left(x \mid \mu_x, \Sigma_x \right) p ( x ) = N ( x ∣ μ x , Σ x )
\(y\)是\(x\)通过线性变换加入随机扰动\(\Sigma_y \)得到的变量:
p ( y ∣ x ) = N ( y ∣ A x + b , Σ y ) p \left(y \mid x \right) = N \left(y \mid Ax+b ,\Sigma_y \right) p ( y ∣ x ) = N ( y ∣ A x + b , Σ y )
已知\(x\),我们可以得到\(y\)的分布:
p ( y ) = N ( y ∣ A μ X + b , Σ y + A Σ x A T ) p \left( y \right) = N \left( y \mid A\mu_X +b, \Sigma_y + A \Sigma_x A^{T} \right) p ( y ) = N ( y ∣ A μ X + b , Σ y + A Σ x A T )
上面这个结论的具体的推导过程可以参考[3]的4.4节,这里我们直接拿来用。
我们可以假设特征权重 \(w\) 满足独立高斯分布,即$$ p(w) = N\left( w \mid \mu ,\Sigma \right)$$:
μ = [ μ 1 , μ 2 , . . . , μ D ] T \mu = \left[ \mu_1,\mu_2,...,\mu_D\right]^{\mathrm{T}} μ = [ μ 1 , μ 2 , ... , μ D ] T
Σ = [ σ 1 2 0 … 0 0 σ 2 2 … 0 ⋮ ⋮ ⋱ ⋮ 0 0 … σ D 2 ] \Sigma = \left[ \begin{matrix} \sigma_1^{2} & 0 & \ldots & 0 \\ 0 & \sigma_2^{2} & \ldots & 0 \\ \vdots &\vdots & \ddots & \vdots \\ 0 & 0 & \ldots & \sigma_D^{2} \\ \end{matrix} \right] Σ = σ 1 2 0 ⋮ 0 0 σ 2 2 ⋮ 0 … … ⋱ … 0 0 ⋮ σ D 2
\(Y\)是一维变量,是\(w\)与特征向量\(x\)的内积,加入方差为\( \beta^{2}\)的扰动:
p ( y ∣ w ) = N ( y ∣ x T w , β 2 ) p\left( y \mid w\right) = N(y \mid x^Tw, \beta^2) p ( y ∣ w ) = N ( y ∣ x T w , β 2 )
根据上面的式子可以得出:
p ( y ∣ w ) = N ( y ∣ x T μ , x T Σ x + β 2 ) p\left( y \mid w\right) = N(y \mid x^T\mu, x^T\Sigma x +\beta^2) p ( y ∣ w ) = N ( y ∣ x T μ , x T Σ x + β 2 )
由于我们只能观测到\( Y \),是大于0,还是小于0,即\(Y_{i} \in \{-1,1\} \),\( Y_{i} = -1\),代表观测值小于0,\( Y_{i} = 1\)代表观测值大于0。
对于观测值,我们可以先用KL距离近似\(y\)的分布,我们可以算出后验:
p ( y ∣ Y i ) = N ( y ∣ m ~ , v ~ 2 ) p\left(y\mid Y_i\right) = N\left(y\mid \tilde m, \tilde v^2 \right) p ( y ∣ Y i ) = N ( y ∣ m ~ , v ~ 2 )
m ~ = x T μ + Y i υ ( Y i ⋅ x T μ x T Σ x + β 2 ) \tilde m = x^T\mu + Y_{i}\upsilon \left(Y_{i} \cdot \frac{x^T\mu}{\sqrt{x^T\Sigma x +\beta^2}}\right) m ~ = x T μ + Y i υ ( Y i ⋅ x T Σ x + β 2 x T μ )
v ~ 2 = ( x T Σ x + β 2 ) ( 1 − ω ( Y i ⋅ x T μ x T Σ x + β 2 ) ) \tilde v^2 = \left(x^T\Sigma x +\beta^2\right)\left(1-\omega\left(Y_{i} \cdot \frac{x^T\mu}{\sqrt{x^T\Sigma x +\beta^2}} \right)\right) v ~ 2 = ( x T Σ x + β 2 ) ( 1 − ω ( Y i ⋅ x T Σ x + β 2 x T μ ) )
有了\(y\)的近似分布,我们可以计算出后验:
p ( w ∣ y ) ∝ p ( y ∣ w ) p ( w ) p\left(w \mid y \right) \propto p\left(y \mid w \right) p\left(w\right) p ( w ∣ y ) ∝ p ( y ∣ w ) p ( w )
可以求得:
p ( w d ∣ y ) = N ( w d ∣ μ ~ d , σ ~ d ) p\left( w_{d} \mid y \right) = N\left( w_{d} \mid \tilde \mu_{d},\tilde \sigma_{d} \right) p ( w d ∣ y ) = N ( w d ∣ μ ~ d , σ ~ d )
μ ~ d = μ d + Y i x i , d ⋅ σ d 2 x T Σ x + β 2 ⋅ υ ( Y i ⋅ x T μ x T Σ x + β 2 ) \tilde \mu_{d} = \mu_{d} + Y_{i} x_{i,d}\cdot \frac {\sigma_{d}^{2} }{\sqrt{x^T\Sigma x +\beta^2}} \cdot \upsilon \left(Y_{i} \cdot \frac{x^T\mu}{\sqrt{x^T\Sigma x +\beta^2}}\right) μ ~ d = μ d + Y i x i , d ⋅ x T Σ x + β 2 σ d 2 ⋅ υ ( Y i ⋅ x T Σ x + β 2 x T μ )
σ ~ d = σ d ⋅ [ 1 − x i , d ⋅ σ d 2 x T Σ x + β 2 ω ( Y i ⋅ x T μ x T Σ x + β 2 ) ] \tilde \sigma_{d} = \sigma_{d} \cdot \left[ 1 - x_{i,d} \cdot \frac{\sigma_{d}^{2}}{x^T\Sigma x +\beta^2} \omega\left(Y_{i} \cdot \frac{x^T\mu}{\sqrt{x^T\Sigma x +\beta^2}} \right) \right] σ ~ d = σ d ⋅ [ 1 − x i , d ⋅ x T Σ x + β 2 σ d 2 ω ( Y i ⋅ x T Σ x + β 2 x T μ ) ]
Online Bayesian Probit Regression 训练流程如下:
初始化 \( \mu_{1} \),\( \sigma_{1}^{2} \), \( \mu_{2} \),\( \sigma_{2}^{2} \) , ... , \( \mu_{D} \),\( \sigma_{D}^{2} \) for i = 1 ... n
观测值为\( Y_{i} \) for d = 1 ... D 更新
μ d = μ d + Y i x i , d ⋅ σ d 2 x i T Σ x i + β 2 ⋅ υ ( Y i ⋅ x i T μ x i T Σ x i + β 2 ) \mu_{d} = \mu_{d} + Y_{i} x_{i,d}\cdot \frac {\sigma_{d}^{2} }{\sqrt{x_{i}^T\Sigma x_{i} +\beta^2}} \cdot \upsilon \left(Y_{i} \cdot \frac{x_{i}^T\mu}{\sqrt{x_{i}^T\Sigma x_{i} +\beta^2}}\right) μ d = μ d + Y i x i , d ⋅ x i T Σ x i + β 2 σ d 2 ⋅ υ ( Y i ⋅ x i T Σ x i + β 2 x i T μ )
σ d = σ d ⋅ [ 1 − x i , d ⋅ σ d 2 x i T Σ x i + β 2 ω ( Y i ⋅ x i T μ x i T Σ x + β 2 ) ] \sigma_{d} = \sigma_{d} \cdot \left[ 1 - x_{i,d} \cdot \frac{\sigma_{d}^{2}}{x_{i}^T\Sigma x_{i} +\beta^2} \omega\left(Y_{i} \cdot \frac{x_{i}^T\mu}{\sqrt{x_{i}^T\Sigma x +\beta^2}} \right) \right] σ d = σ d ⋅ [ 1 − x i , d ⋅ x i T Σ x i + β 2 σ d 2 ω ( Y i ⋅ x i T Σ x + β 2 x i T μ ) ]
除了Online Bayesian Learning,还有一种做法就是FTRL(Follow The Regularized Leader)。 FTRL的网上资料很多,但是大部分介绍怎么样产生稀疏化解,而往往忽略了FTRL的基本原理。顾名思义,FTRL和稀疏化并没有关系,它只是一种做Online Learning的思想。
先说说FTL(Follow The Leader)算法,FTL思想就是每次找到让之前所有损失函数之和最小的参数。流程如下:
初始化 \( w \) for t = 1 ... n
损失函数 \( f_{t} \) 更新
w = a r g m i n w ∑ i = 1 t f i ( w ) w = argmin_{w} \sum_{i=1}^{t} f_i \left (w \right) w = a r g mi n w i = 1 ∑ t f i ( w )
FTRL算法就是在FTL的优化目标的基础上,加入了正规化,防止过拟合:
w = a r g m i n w ∑ i = 1 t f i ( w ) + R ( w ) w = argmin_{w} \sum_{i=1}^{t} f_i \left (w \right) + R(w) w = a r g mi n w i = 1 ∑ t f i ( w ) + R ( w )
其中,\(R(w)\)是正规化项。
FTRL算法的损失函数,一般也不是能够很快求解的,这种情况下,一般需要找一个代理的损失函数。
代理损失函数需要满足几个要求:
代理损失函数比较容易求解,最好是有解析解 优化代理损失函数求的解,和优化原函数得到的解差距不能太大 为了衡量条件2中的两个解的差距,这里需要引入regret的概念。
假设每一步用的代理函数是\( h_t \left( w \right)\) 每次取
w t = a r g m i n w h t − 1 ( w ) w_{t} = argmin_{w} h_{t-1} \left (w \right) w t = a r g mi n w h t − 1 ( w )
R e g r e t t = ∑ t = 1 T f t ( w t ) − ∑ t = 1 T f t ( w ∗ ) Regret_{t} =\sum_{t=1}^{T}f_{t}\left(w_{t}\right) - \sum_{t=1}^{T}f_{t}\left(w^{*}\right) R e g r e t t = t = 1 ∑ T f t ( w t ) − t = 1 ∑ T f t ( w ∗ )
其中\( w^{*} = argmin_{w} \sum_{i=1}^{t}f_i\left(w\right) \),是原函数的最优解。就是我们每次代理函数求出解,离真正损失函数求出解的损失差距。当然这个损失必须满足一定的条件,Online Learning才可以有效,就是:
lim t → ∞ R e g r e t t t = 0 \lim_{t \rightarrow \infty } \frac{Regret_t}{t} = 0 t → ∞ lim t R e g r e t t = 0
随着训练样本的增多,这两个优化目标优化出的参数的实际损失值差距越来越小。
代理函数 \( h_t(w)\) 应该该怎么选呢? 如果\( f_t(w) \) 是凸函数,我们可以用下面的代理损失函数:
h t = ∑ i = 1 t g i ⋅ w + ∑ i = 1 t ( 1 2 η t − 1 2 η t − 1 ) ∣ ∣ w − w t ∣ ∣ 2 h_{t} = \sum_{i=1}^{t} g_{i}\cdot w + \sum_{i=1}^{t} \left(\frac{1}{2 \eta_{t}} - \frac{1}{2 \eta_{t-1}} \right)||w - w_{t}||^{2} h t = i = 1 ∑ t g i ⋅ w + i = 1 ∑ t ( 2 η t 1 − 2 η t − 1 1 ) ∣∣ w − w t ∣ ∣ 2
其中\(g_i\) 是\(f_i( w_i) \)次梯度(如果 \(f_i(w_i)\)是可导的,次梯度就是梯度)。\( \eta_{t} \)满足:
η t = α ∑ i = 1 t g t 2 \eta_{t} = \frac{\alpha}{\sqrt{\sum_{i=1}^{t} g_{t}^{2}}} η t = ∑ i = 1 t g t 2 α
为了产生稀疏的效果,我们也可以加入l1正规化:
h t = ∑ i = 1 t g i ⋅ w + ∑ i = 1 t ( 1 2 η t − 1 2 η t − 1 ) ∣ ∣ w − w t ∣ ∣ 2 + λ 1 ∣ w ∣ h_{t} = \sum_{i=1}^{t} g_{i}\cdot w + \sum_{i=1}^{t} \left(\frac{1}{2 \eta_{t}} - \frac{1}{2 \eta_{t-1}} \right)||w - w_{t}||^{2} + \lambda_{1}|w| h t = i = 1 ∑ t g i ⋅ w + i = 1 ∑ t ( 2 η t 1 − 2 η t − 1 1 ) ∣∣ w − w t ∣ ∣ 2 + λ 1 ∣ w ∣
只要\( f_t(w) \) 是凸函数,上面的代理函数一定满足:
lim t → ∞ R e g r e t t t = 0 \lim_{t \rightarrow \infty } \frac{Regret_t}{t} = 0 t → ∞ lim t R e g r e t t = 0
上面的式子我们可以得出\(w\)的解析解:
w t + 1 , i = { 0 ∣ z t , i ∣ < λ 1 − η t ( z t , i − s g n ( z t , i ) λ 1 ) ) o t h e r w i s e w_{t+1,i} = \left\{ \begin{array}{ll} 0 & |z_{t,i}| < \lambda_{1} \\ -\eta_{t}(z_{t,i} - sgn(z_{t,i})\lambda_{1}) ) & otherwise \end{array} \right. w t + 1 , i = { 0 − η t ( z t , i − s g n ( z t , i ) λ 1 )) ∣ z t , i ∣ < λ 1 o t h er w i se
其中
z t , i = ∑ s = 1 t g s , i + ∑ s = 1 t ( 1 η t , i − 1 η t − 1 , i ) w t , i z_{t,i} = \sum_{s=1}^{t}g_{s,i} + \sum_{s=1}^{t}\left( \frac{1}{ \eta_{t,i}} - \frac{1}{ \eta_{t-1,i}} \right) w_{t,i} z t , i = s = 1 ∑ t g s , i + s = 1 ∑ t ( η t , i 1 − η t − 1 , i 1 ) w t , i
可以得到FTRL的更新流程如下:
输入\(\alpha \), \( \lambda_{1} \) 初始化 \( w_{1...N} \), \( z_{1..N} = 0\) , \(n_{1..N} = 0\) for t = 1 ... T
损失函数 \( f_{t} \) for i = 1 ..N
计算
g t , i = ∂ f i ( w t − 1 ) w t − 1 , i g_{t,i} = \frac{\partial f_{i}\left(w_{t-1}\right)}{w_{t-1,i}} g t , i = w t − 1 , i ∂ f i ( w t − 1 )
z t + = g t , i + 1 α ( n i + g t , i 2 − n i ) w t , i z_{t} += g_{t,i} + \frac{1}{\alpha} \left( \sqrt{n_{i} + g_{t,i}^{2}} -\sqrt{ n_{i} } \right) w_{t,i} z t + = g t , i + α 1 ( n i + g t , i 2 − n i ) w t , i
n i + = g t , i 2 n_{i} += g_{t,i}^{2} n i + = g t , i 2
更新
w t + 1 , i = { 0 ∣ z t , i ∣ < λ 1 − η t ( z t , i − s g n ( z t , i ) λ 1 ) ) o t h e r w i s e w_{t+1,i} = \left\{ \begin{array}{ll} 0 & |z_{t,i}| < \lambda_{1} \\ -\eta_{t}(z_{t,i} - sgn(z_{t,i})\lambda_{1}) ) & otherwise \end{array} \right. w t + 1 , i = { 0 − η t ( z t , i − s g n ( z t , i ) λ 1 )) ∣ z t , i ∣ < λ 1 o t h er w i se
前面讲了Online Learning的基本原理,这里以移动端推荐重排序为例,介绍一下Online Learning在实际中的应用。
推荐重排序介绍
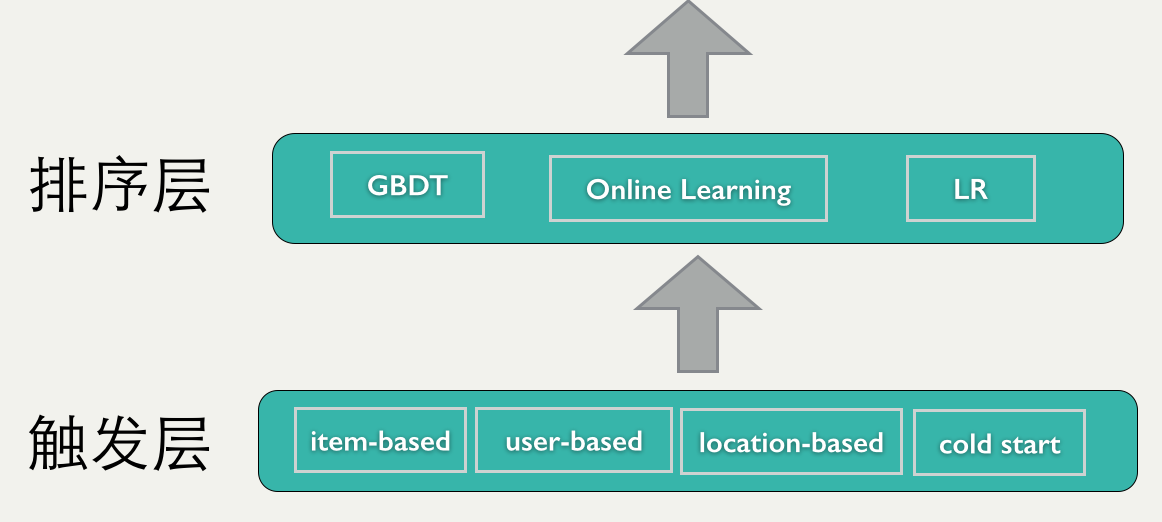
目前的推荐系统,主要采用了两层架构,首先是触发层,会根据上下文条件和用户的历史行为,触发用户可能感兴趣的item,然后由排序模型对触发的item排序,如下图所示:
推荐重排序既能融合不同触发策略,又能较大幅度提高推荐效果(我们这里主要是下单率)。在移动端,屏幕更加小,用户每次看到的item数目更加少,排序的作用更加突出。
美团重排序Online Learning架构
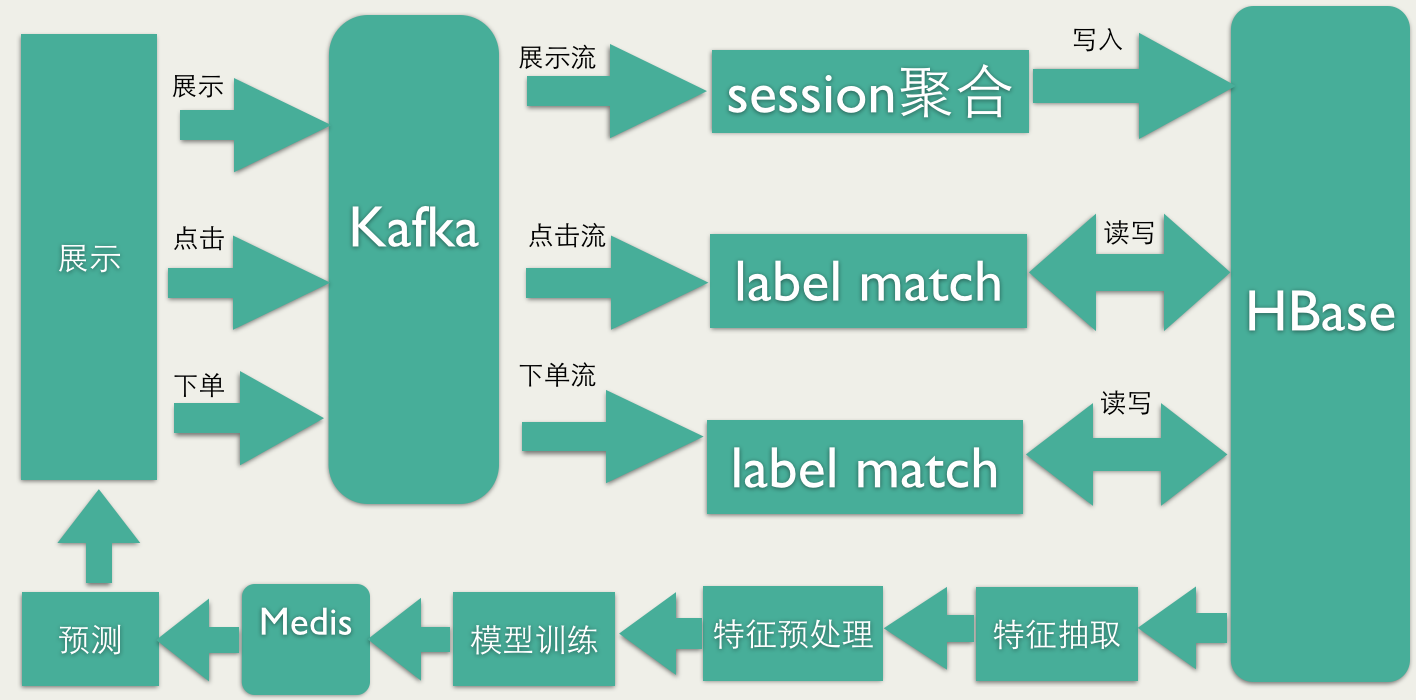
美团Online Learning架构如下图所示:
线上的展示日志,点击日志和下单日志会写入不同的Kafka流。读取Kafka流,以HBase为中间缓存,完成label match(下单和点击对映到相应的展示日志),在做label match的过成中,会对把同一个session的日志放在一起,方便后面做skip above:
训练数据生成
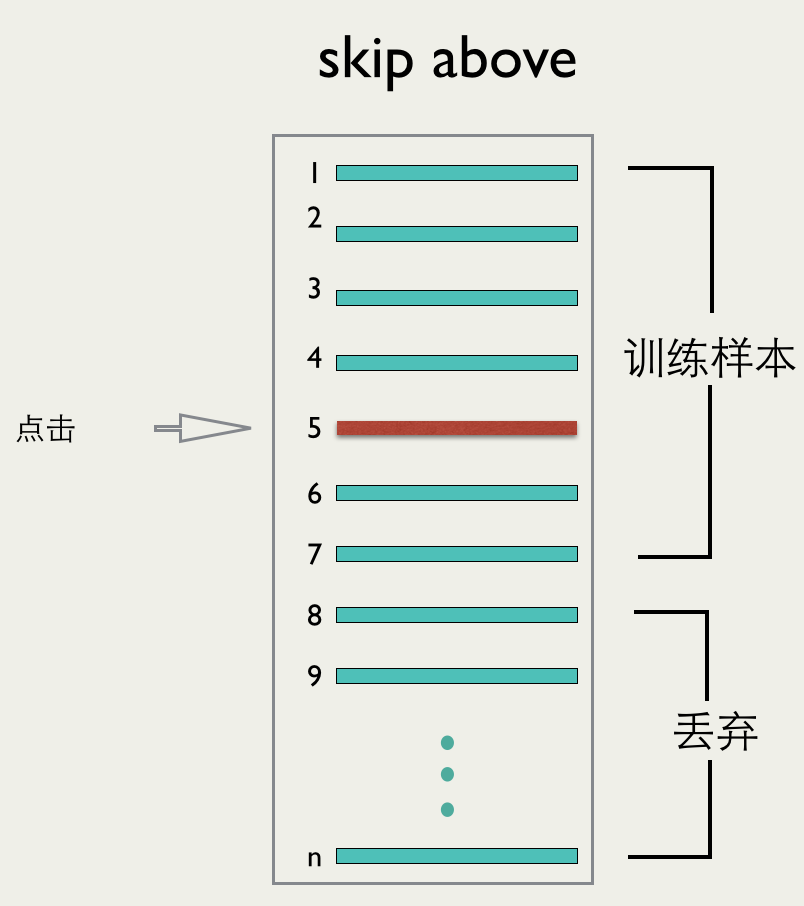
移动端推荐的数据跟PC端不同,移动端一次会加载很多item,但是无法保证这些item会被用户看到。为了保证数据的准确性,我们采用了skip above的办法,如下图所示:
假设用户点击了第i个位置,我们保留从第1条到第i+2条数据作为训练数据,其他的丢弃。这样能够最大程度的保证训练样本中的数据是被用户看到的。
特征
用的特征如下图所示:
算法选择
我们尝试了FTRL和BPR效果,线下实验效果如下表:
算法 AUC 模型参数个数 FTRL 0.8432 200W BPR 0.8441 1500W
BPR的效果略好,但是我们线上选用了FTRL模型,主要原因是FTRL能够产生稀疏化的效果,训练出的模型会比较小。
模型训练
训练算法不断地从HBase中读取数据,完成模型地训练,训练模型放在Medis(美团内部地Redis)中,线上会用Medis中的模型预测下单率,根据预测的下单率,完成排序。
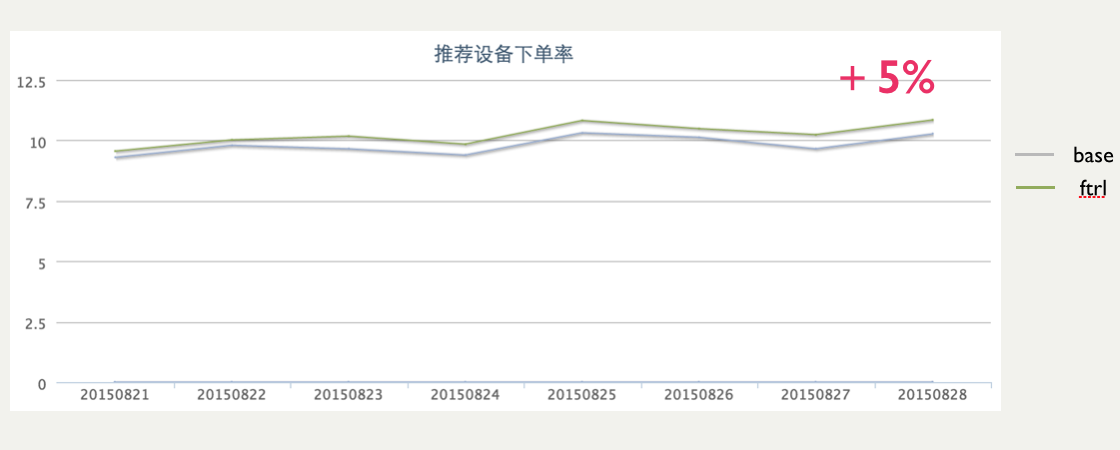
线上效果
上线后,最终的效果如下图所示,和base算法相比,下单率提高了5%。
[1] McMahan H B, Holt G, Sculley D, et al. Ad Click Prediction: a View from the Trenches. Proceedings of the 19th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining (KDD). 2013. [2] Graepel T, Candela J Q, Borchert T,et al. Web-Scale Bayesian Click-Through Rate Prediction for Sponsored Search Advertising in Microsoft's Bing Search Engine. Proceedings of the 27th International Conference on Machine Learning ICML. 2010. [3] Murphy K P. Machine Learning: A Probabilistic Perspective. The MIT Press. 2012.